哈希表(又称作散列表)这种数据结构,通过计算元素在哈希表中的存储位置,可以快速判定该元素是否存在于该哈希表中,而无需遍历哈希表中全部元素一一进行比较。看上去哈希表这种数据结构是一个很好的工具,但是当数据量非常大达到亿级别,再加上为了解决哈希冲突的负载因子的缘故,使得哈希表的内存空间开销非常巨大,甚至会出现机器内存都无法支撑的情况。这种超大规模数据的场景下,如何快速判定一个元素是否在指定元素集合中?本文将详细介绍一种概率模型的数据结构——布隆过滤器(Bloom Filter)

基本原理
在哈希表中存放的是元素本身,而 Bloom Filter 在内存中是一个足够大的位数组(Bit Array),其最小的内存使用单位是Bit(仅这一点,内存开销就已经大大压缩了)。元素在插入Bloom Filter时,使用哈希函数(Hash Function)计算其哈希值确定其在位数组中的位置索引,然后将位数组中的指定Bit从0置1即可(如该Bit已经被置1,则无需再次置1)。当使用Bloom Filter判定指定元素是否存在其中时,同样利用该Hash Function先计算哈希值,确定其在位数组的中位置索引,然后取出该位置的值, 若该Bit为0,则说明该元素不存在于其中;若该Bit为1,则说明该元素存在于其中
现已向一个Bloom Filter分别插入元素”Hello”、”World”为例,给出其插入过程的图解
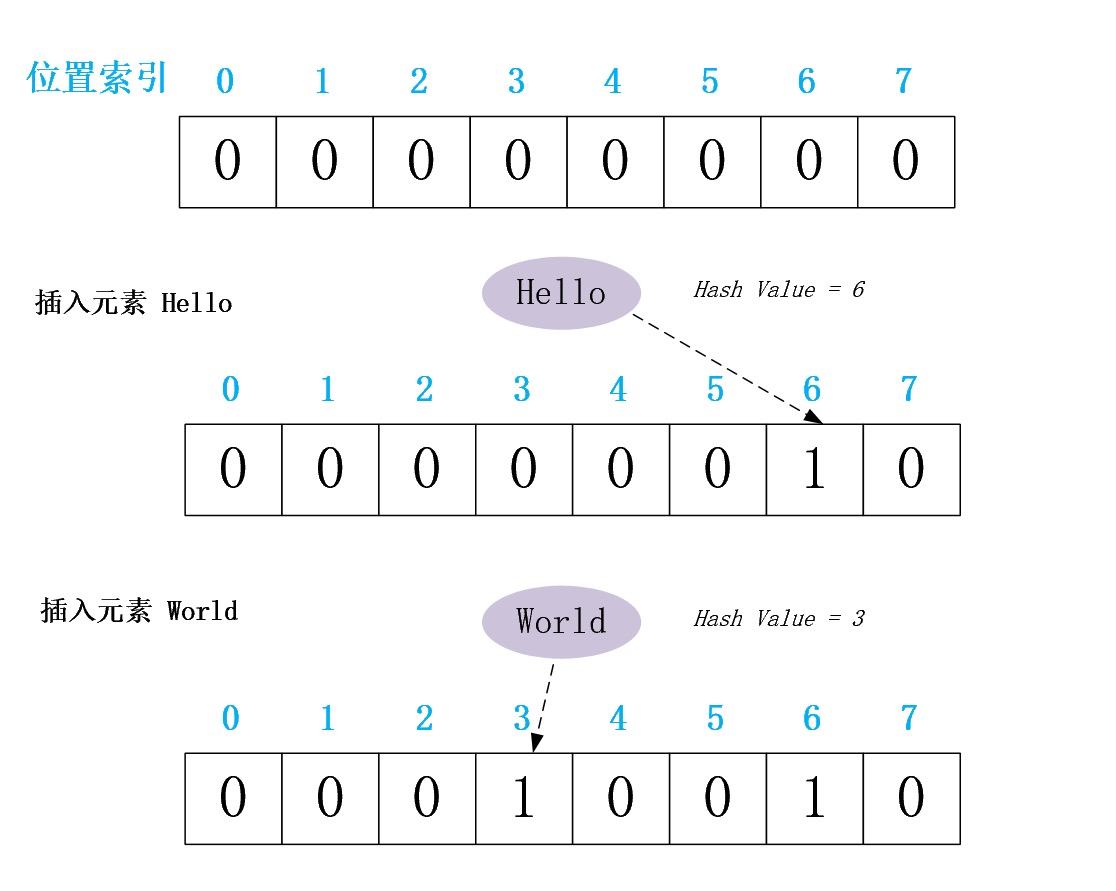
当判断元素”World”是否在该Bloom Filter中时,先利用Hash Function计算其哈希值(Hash Value = 3),确定其在位数组的中位置索引,然后取出该位置的值(即,BitArray[3]),其值为1,即说明元素”World”存在于该Bloom Filter中;当判断元素”Tony”是否在该Bloom Filter中时,先利用Hash Function计算其哈希值(Hash Value = 0),确定其在位数组的中位置索引,然后取出该位置的值(即,BitArray[0]),其值为0,即说明元素”Tony”不存在于该Bloom Filter中
至此,Bloom Filter 模型的基本原理已经介绍完毕了。聪明的朋友可能已经发现了一个问题,即,发生哈希冲突可能会导致误判。假设我们现在对该Bloom Filter来判定元素”Wow”是否存在其中,其哈希值计算后,恰好为3。,从上图可知BitArray[3]=1,则那么根据上文介绍的判定规则,我们判定元素”Wow”存在于该Bloom Filter,显然该判定结果与该Bloom Filter中仅存在”Hello”、”World”两个元素的真实情况不符
因此正如前文所述,其是一种概率模型的数据结构,发生哈希冲突的概率可以减少,但是无法完全避免。故判定一个元素是否存在于Bloom Filter,如果判定结果是不存在(False),则一定不存在;但是如果判定结果是存在(True),则实际情况其实是可能存在,而不是一定存在,即假阳性。 所以,实际应用中,在Bloom Filter 一般会使用多个Hash Function,以减小发生哈希冲突的概率。即,减小误判率 P(true)。插入一个元素时,分别计算其在各个Hash Function的哈希值,然后将各个哈希值对应的Bit的值置1;而判定元素是否存在于Bloom Filter时,则要求各个哈希值对应的Bit的值均为1才行
现依然是已向一个Bloom Filter分别插入元素”Hello”、”World”为例,给出其插入过程的图解。不同的是,这次我们使用了2个Hash Function,并说明提高Hash Function个数如何降低误判率 P(true)
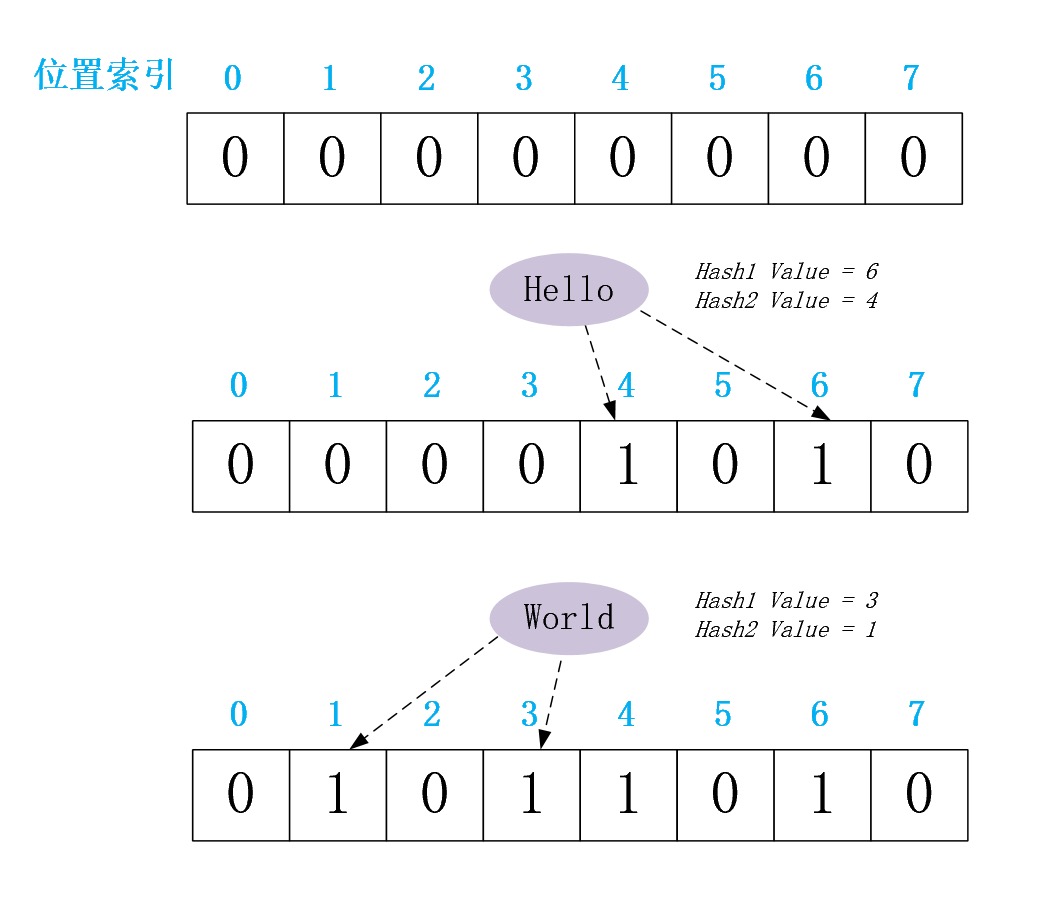
假设我们现在对该Bloom Filter依然判定元素”Wow”是否存在其中,其分别使用两个Hash Function计算哈希值,分别为3、0。从上图可知虽然BitArray[3]=1但是BitArray[0]=0,则那么根据上文介绍的判定规则,我们即可判定元素”Wow”不存在于该Bloom Filter。从这里,我们看出,提高Hash Function的个数可以显著降低误判率 P(true)
细谈参数设计
相信大家对于 Bloom Filter 的工作原理都有了一个基本的了解,现在我们来看看在Bloom Filter 中涉及到的一些参数指标:
- 欲插入Bloom Filter中的元素数目: n
- Bloom Filter误判率: P(true)
- BitArray数组的大小: m
- Hash Function的数目: k
欲插入Bloom Filter中的元素数目 n 是我们在实际应用中可以提前获取或预估的;Bloom Filter的误判率 P(true) 则是我们提前设定的可以接受的容错率。所以在设计Bloom Filter过程中,最关键的参数就是BitArray数组的大小 m 和 Hash Function的数目 k,下面将给出这两个关键参数的设定依据、方法
误判率 P(true)
向Bloom Filter插入一个元素时,其一个Hash Function会将BitArray中的某Bit置为1,故对于任一Bit而言,其被置为1的概率 $P_1=\frac{1}{m}$,那么其依然是0的概率 $P_0 = 1 - P_1 = 1- \frac{1}{m}$;易知插入一个元素时,其 $k$ 个Hash Function 都未将该Bit置为1的概率 $P_0^1 = ( 1- \frac{1}{m} )^k$。则向Bloom Filter 插入全部n个元素后,该Bit依然为0的概率即为 $P_0^n = ( 1- \frac{1}{m} )^{kn}$,反之,该Bit为1的概率则为 $P_1^n = 1- P_0^n = 1 - ( 1- \frac{1}{m} )^{kn}$
由前文可知,判定一个元素存在于Bloom Filter,要求k个Hash Function的哈希值对应的Bit的值均为1。据此,我们可以计算出其误判率 P(true):
根据基本极限
可知:
从上式可以看出,当BitArray数组的大小m增大 或 欲插入Bloom Filter中的元素数目n 减小时,均可以使得误判率P(true)下降
Hash Function的数目 k
前文已经看到Hash Function数目k的增加可以减小误判率P(true),但是随着Hash Function数目k的继续增加,反而会使误判率P(true)上升,即误判率是一个关于Hash Function数目k的凸函数。所以当k在极值点时,此时误判率即为最小值
令 $a = e^{\frac{n}{m}}$,则有:
分别对上式两边,先取对数,再对k求一次导,可有:
易知,当k取极值点时,有 $f(k)^\prime = 0$,故将其带入上式即可求出k
此时,我们即可以利用上式的结果,通过m和n来确定最优的Hash Function数目k
BitArray数组的大小 m
如何确定BitArray数组的大小 m 呢?这里,我们联立 P(true)、k 的公式,即可解出 m
联立后有:
对上式求解,可得:
此时,我们即可以利用上式的结果,通过P(true)和n来确定最优的BitArray数组的大小 m
应用场景
1. 爬虫
由于互联网中的网页数量巨大,如果使用哈希表保存爬虫工具访问过的url显然是不现实的,此时即可使用Bloom Filter来存储。当爬虫工具每次爬取一个网页,判定该网页是否已经被爬取过时,如果Bloom Filter给出的是结果是False,则事实上一定没有被访问过,即可去爬虫;但如果Bloom Filter给出的是结果是True,即,该网页已经被爬取过。虽然有一定概率出现误判,即该网页其实并未被访问过。但是鉴于互联网中网页数目浩如烟海,遗漏很小一部分网页未被爬取访问在工程上也是可以接受的
2. 缓存穿透
缓存穿透:外部发送请求去查询一个缓存中一定不存在的数据。由于未命中缓存,则外部请求将直接转发到DB中,当外部频繁请求、流量过大时,即可能会直接导致DB服务宕机
同样地,这里可以应用Bloom Filter 来加在缓存前一级用于过滤查询请求,当判定查询数据不存在,即可直接返回请求而无需向缓存、DB传递该请求
参考文献
- 《数学之美》 吴军著